2 Mai 2015
Le pied avec contacteur et rotule est destiné à être fixé sur la base d'une fourche (droite ou avec angle) décrite dans le précédent article.
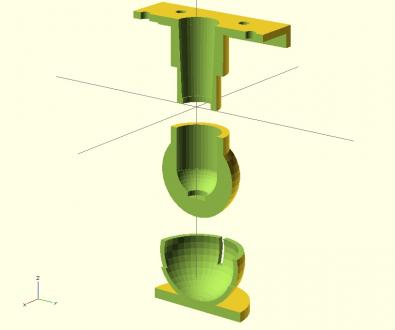
Ci-dessous : la modélisation sous OpenScad,, dont une coupe longitudinale (à droite) sur laquelle on distingue les formes intérieures.
la pièce du haut ets destinée à accueillir le contacteur. Le bout du contacteur se logue dans la sphère et y sera collé.
Le siège de rotule du pied est "clipsé" sur la sphère. Cette liaison est démontable : on peut remplacer le pied ou en clipser un autre qui aurait le même siège de rotule.

Ci-dessous : un pied-contact-rotule imprimé 3D et fixé sur une fourche inclinée à 45°.
Le pied a une course longitudinale de 1 mm, correspondant à l'enfoncement du contacteur.




Ci-dessous : on distingue le contacteur fixé dans son support, ainsi que la rotule et, à droite, 3 autres sièges de rotule imprimés 3D.


Ci-dessous : les deux versions de pied-contact .
- avec rotule (en haut) ,
- sans rotule (en bas).


/image%2F0649876%2F20250412%2Fob_ea7a26_gxjxxkxeawfoisdlaydzqxg-khm.jpg)




